中国水稻科学 ›› 2025, Vol. 39 ›› Issue (4): 423-439.DOI: 10.16819/j.1001-7216.2025.250104
• 专题:水稻生产机械化与智能化 • 下一篇
肖茂华*( ), 田丰瑜, 魏文波, 朱烨均, 李东方, 张鹏程, 耿国盛
), 田丰瑜, 魏文波, 朱烨均, 李东方, 张鹏程, 耿国盛
收稿日期:2025-01-07
修回日期:2025-02-26
出版日期:2025-07-10
发布日期:2025-07-21
通讯作者:
*email: xiaomaohua@njau.edu.cn基金资助:
XIAO Maohua*(), TIAN Fengyu, WEI Wenbo, ZHU Yejun, LI Dongfang, ZHANG Pengcheng, GENG Guosheng
Received:2025-01-07
Revised:2025-02-26
Online:2025-07-10
Published:2025-07-21
Contact:
*email:xiaomaohua@njau.edu.cn
摘要:
拖拉机作业机组是指由拖拉机与配套机具组成的一种具有独特铰接牵引式结构的农业机械系统,路径跟踪控制方法是实现该机组无人化作业的关键技术。然而,受限于农业环境的多变性及铰接式车体复杂的转向结构,现有方法在适应性、鲁棒性和控制效率方面仍面临挑战。本文旨在通过分析机组模型、路径跟踪控制算法,系统概述拖拉机作业机组路径跟踪控制方法的研究现状。此外,讨论了拖拉机作业机组路径跟踪控制方法研究面临的主要问题及解决思路,以期为拖拉机作业机组路径跟踪控制方法的研究工作提供有益参考。
肖茂华, 田丰瑜, 魏文波, 朱烨均, 李东方, 张鹏程, 耿国盛. 拖拉机作业机组路径跟踪控制方法研究进展[J]. 中国水稻科学, 2025, 39(4): 423-439.
XIAO Maohua, TIAN Fengyu, WEI Wenbo, ZHU Yejun, LI Dongfang, ZHANG Pengcheng, GENG Guosheng. Research on Path Tracking Control Methods for Tractor Operating Units: A Review[J]. Chinese Journal OF Rice Science, 2025, 39(4): 423-439.
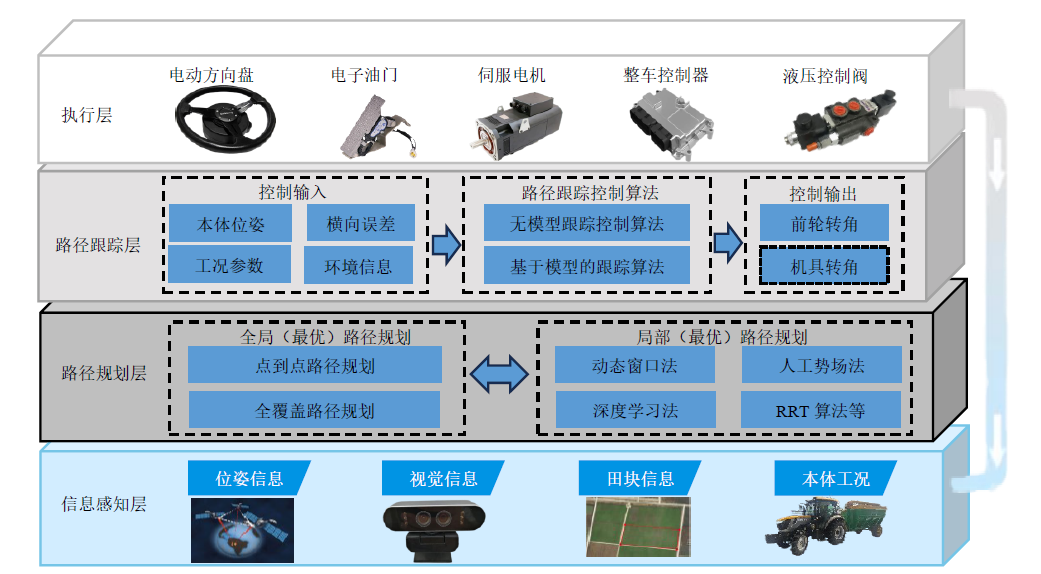
图1 拖拉机作业机组无人驾驶系统
Fig. 1. Unmanned system of tractor operating units
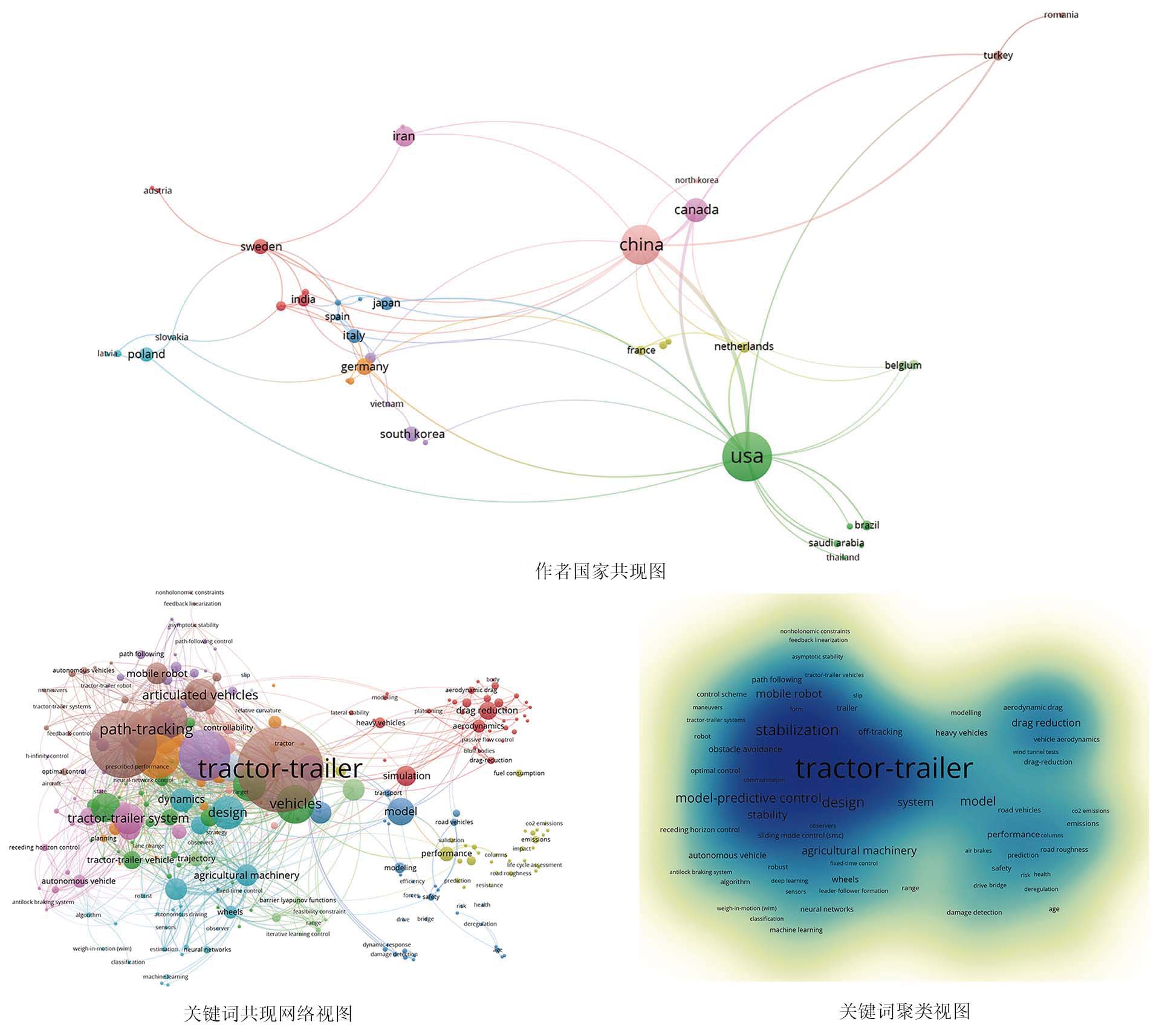
图2 文献计量学分析
Fig. 2. Bibliometric analysis
| 模型 Model | 研究内容 Research content | 精确性 Accuracy | 计算成本 Computational cost | 相关文献 Reference |
|---|---|---|---|---|
| 几何学模型 Geometric model | 几何特性 Geometric characteristics | 低Low | 低Low | [ |
| 运动学模型 Kinematic model | 运动特性 Kinematic characteristics | 中Medium | 中Medium | [ |
| 动力学模型 Dynamic model | 转向特性、稳定特性、振动特性、负载特性 Steering, stability, vibration, and load characteristics | 高High | 高High | [ |
表1 主要机组模型比较
Table 1. Comparison of major unit models
| 模型 Model | 研究内容 Research content | 精确性 Accuracy | 计算成本 Computational cost | 相关文献 Reference |
|---|---|---|---|---|
| 几何学模型 Geometric model | 几何特性 Geometric characteristics | 低Low | 低Low | [ |
| 运动学模型 Kinematic model | 运动特性 Kinematic characteristics | 中Medium | 中Medium | [ |
| 动力学模型 Dynamic model | 转向特性、稳定特性、振动特性、负载特性 Steering, stability, vibration, and load characteristics | 高High | 高High | [ |
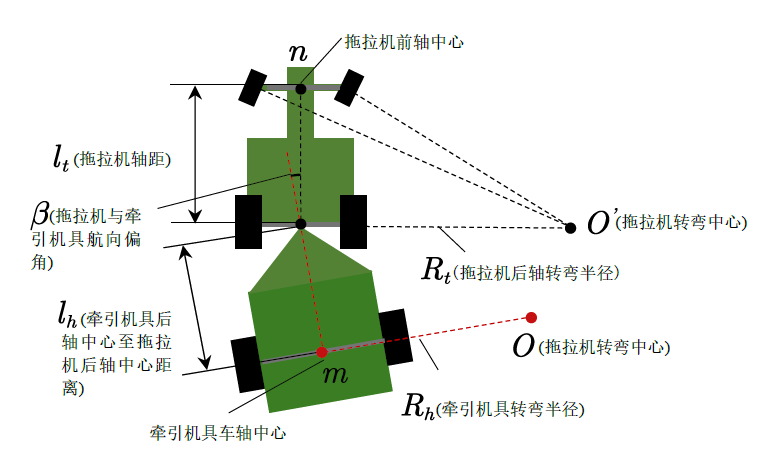
图3 几何学模型
Fig. 3. Schematic of geometric model
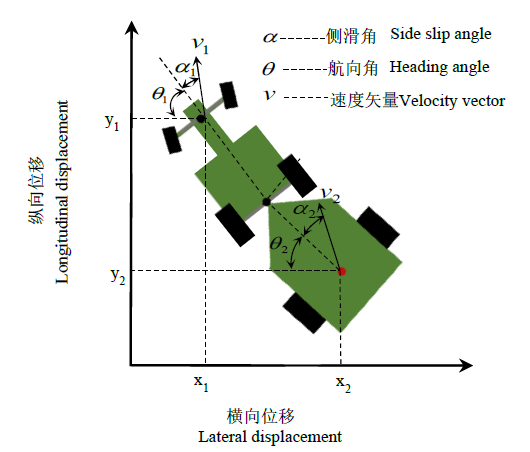
图4 运动学模型
Fig. 4. Schematic of kinematic model
| 分类 Category | 方法 Method | 优点 Advantage | 缺点 Disadvantag | 相关文献 Reference |
|---|---|---|---|---|
| 直接测量法 Direct measurement method | 光电传感器 Photoelectric sensor | 精度高,可实现直接测量 High accuracy, direct measurement | 成本较高,不适用于量产车辆 High cost, not suitable for mass-produced vehicles | [ |
| 基于模型观察器的估计方法 Model observer-based estimation method | 卡尔曼滤波法 Kalman filter method | 可直接利用输入进行估计,模型简单,计算效率高 Can directly use inputs for estimation, simple model, high computational Efficiency | 精度有限,难以应对复杂和极端工况 Limited accuracy, difficult to handle complex and extreme conditions | [ |
| GNSS辅助卡尔曼滤波法 GNSS-assisted Kalman filtering | 成本低、估计精度高 Low cost, high estimation accuracy | 信号传输易受遮挡物影响,测量速率较低 Signal transmission susceptible to obstructions, low measurement rate | [ | |
| 龙伯格观测器 Luenberger observer | 结构简单,易于实现 Simple structure, easy to implement | 性能高度依赖于系统模型的准确性 Performance highly depends on the accuracy of the system model | [ | |
| 基于神经网络的估计方法 Neural network-based estimation method | 人工神经网络 Artificial neural network | 降低了对模型及其相关复杂参数集的依赖 Reduces dependence on the model and complex parameter sets | 依赖于训练数据的质量,需要较高的计算资源和时间 Relies on the quality of training data, requires high computational resources and time | [ |
表2 侧滑角测量方法
Table 2. Measurement of side slip angle
| 分类 Category | 方法 Method | 优点 Advantage | 缺点 Disadvantag | 相关文献 Reference |
|---|---|---|---|---|
| 直接测量法 Direct measurement method | 光电传感器 Photoelectric sensor | 精度高,可实现直接测量 High accuracy, direct measurement | 成本较高,不适用于量产车辆 High cost, not suitable for mass-produced vehicles | [ |
| 基于模型观察器的估计方法 Model observer-based estimation method | 卡尔曼滤波法 Kalman filter method | 可直接利用输入进行估计,模型简单,计算效率高 Can directly use inputs for estimation, simple model, high computational Efficiency | 精度有限,难以应对复杂和极端工况 Limited accuracy, difficult to handle complex and extreme conditions | [ |
| GNSS辅助卡尔曼滤波法 GNSS-assisted Kalman filtering | 成本低、估计精度高 Low cost, high estimation accuracy | 信号传输易受遮挡物影响,测量速率较低 Signal transmission susceptible to obstructions, low measurement rate | [ | |
| 龙伯格观测器 Luenberger observer | 结构简单,易于实现 Simple structure, easy to implement | 性能高度依赖于系统模型的准确性 Performance highly depends on the accuracy of the system model | [ | |
| 基于神经网络的估计方法 Neural network-based estimation method | 人工神经网络 Artificial neural network | 降低了对模型及其相关复杂参数集的依赖 Reduces dependence on the model and complex parameter sets | 依赖于训练数据的质量,需要较高的计算资源和时间 Relies on the quality of training data, requires high computational resources and time | [ |
| 轮胎模型 Tire model | 特点 Characteristics | 相关文献Reference | |
|---|---|---|---|
| 线性轮胎模型 Linear tire model | 假设轮胎横向力与侧滑角成正比 Assumes that lateral tire force is proportional to the slip angle | [ | |
| 非线性轮胎 模型 Nonlinear tire model | 魔术公式轮胎模型 Magic formula tire model | 采用一组经验公式来描述轮胎特性,适用于高速、急转弯、滑移等工况 Uses a set of empirical formulas to describe tire characteristics, suitable for high-speed, sharp turns, and sliding conditions | [ |
| S形轮胎模型 S-shaped tire model | 使用逻辑S形函数或类似函数来描述横向力与侧滑角之间的关系 Uses logical S-shaped or similar functions to describe the relationship between lateral force and slip angle | [ | |
| LuGre轮胎模型 LuGre tire model | 通过模拟轮胎与路面之间的摩擦行为来计算轮胎的横向力和纵向力,广泛应用于高级车辆动力学仿真 Calculates lateral and longitudinal tire forces by simulating friction behavior between tire and road, widely used in advanced vehicle dynamics simulation | [ | |
| Burckhardt轮胎模型 Burckhardt tire model | 适用于开发和测试针对冬季低摩擦路面条件的车辆控制系统 Suitable for the development and testing of vehicle control systems for winter low-friction road conditions | [ | |
| Gim轮胎模型 Gim tire model | 适用于描述不同路面条件下轮胎的统一响应 Focuses on the unified description of tire mechanical response under different road conditions | [ | |
表3 轮胎模型及其特点
Table 3. Tire model and its characteristics
| 轮胎模型 Tire model | 特点 Characteristics | 相关文献Reference | |
|---|---|---|---|
| 线性轮胎模型 Linear tire model | 假设轮胎横向力与侧滑角成正比 Assumes that lateral tire force is proportional to the slip angle | [ | |
| 非线性轮胎 模型 Nonlinear tire model | 魔术公式轮胎模型 Magic formula tire model | 采用一组经验公式来描述轮胎特性,适用于高速、急转弯、滑移等工况 Uses a set of empirical formulas to describe tire characteristics, suitable for high-speed, sharp turns, and sliding conditions | [ |
| S形轮胎模型 S-shaped tire model | 使用逻辑S形函数或类似函数来描述横向力与侧滑角之间的关系 Uses logical S-shaped or similar functions to describe the relationship between lateral force and slip angle | [ | |
| LuGre轮胎模型 LuGre tire model | 通过模拟轮胎与路面之间的摩擦行为来计算轮胎的横向力和纵向力,广泛应用于高级车辆动力学仿真 Calculates lateral and longitudinal tire forces by simulating friction behavior between tire and road, widely used in advanced vehicle dynamics simulation | [ | |
| Burckhardt轮胎模型 Burckhardt tire model | 适用于开发和测试针对冬季低摩擦路面条件的车辆控制系统 Suitable for the development and testing of vehicle control systems for winter low-friction road conditions | [ | |
| Gim轮胎模型 Gim tire model | 适用于描述不同路面条件下轮胎的统一响应 Focuses on the unified description of tire mechanical response under different road conditions | [ | |
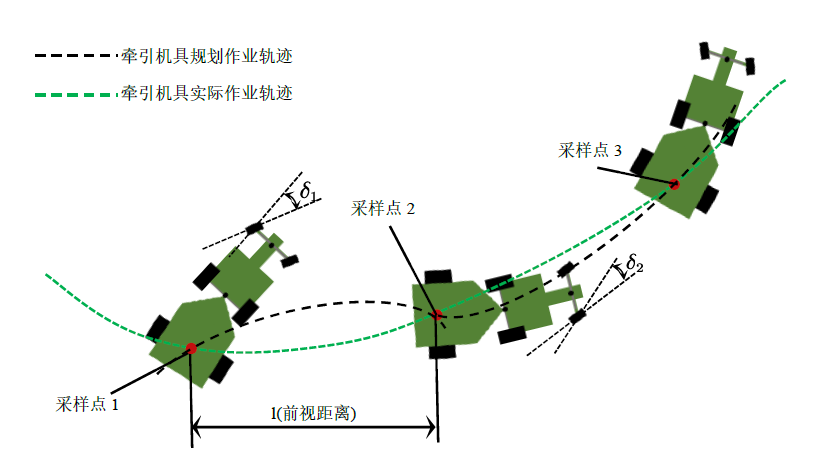
图5 拖拉机作业机组纯跟踪控制模型
Fig. 5. Pure pursuit control model for tractor operating unit
| 分类 Category | 控制律 Control law | 适用场景 Application scenario | 优点 Advantage | 相关文献Reference |
|---|---|---|---|---|
| 线性控制律 Linear control law | 比例控制律 Proportional control law | 系统动态较简单且响应线性,适用于简单的 机械系统和电气驱动系统 Suitable for systems with simple dynamics and linear responses, such as simple mechanical systems and electrical drive systems | 易于实现,调节简单 Easy to implement and simple to tune | [ |
| 非线性控制律 Nonlinear control law | 指数控制律Exponential control law | 用于快速趋近滑模面且避免过冲,适用于复 杂或高动态系统 Used for fast reaching of the sliding surface and avoiding overshoot, suitable for complex or highly dynamic systems | 有利于减小抖振,提供更平滑的控制响应 Helps to reduce chattering and provides smoother control response | [ |
| 双曲正切控制律Hyperbolic tangent control law | 适用于调节存在干扰的非线性系统 Suitable for adjusting nonlinear systems with disturbances | 能够在接近滑模面时平滑控制输入,减少不稳定性 Can smooth the control input near the sliding surface and reduce instability | [ | |
| 饱和控制律 Saturation control law | 适用于高非线性系统中,如电机驱动 Suitable for highly nonlinear systems, such as motor drives | 避免控制输入过大导致系统不稳定 Avoids excessive control input that may cause system instability | [ |
表4 常见的滑模控制律
Table 4. Common sliding mode control laws
| 分类 Category | 控制律 Control law | 适用场景 Application scenario | 优点 Advantage | 相关文献Reference |
|---|---|---|---|---|
| 线性控制律 Linear control law | 比例控制律 Proportional control law | 系统动态较简单且响应线性,适用于简单的 机械系统和电气驱动系统 Suitable for systems with simple dynamics and linear responses, such as simple mechanical systems and electrical drive systems | 易于实现,调节简单 Easy to implement and simple to tune | [ |
| 非线性控制律 Nonlinear control law | 指数控制律Exponential control law | 用于快速趋近滑模面且避免过冲,适用于复 杂或高动态系统 Used for fast reaching of the sliding surface and avoiding overshoot, suitable for complex or highly dynamic systems | 有利于减小抖振,提供更平滑的控制响应 Helps to reduce chattering and provides smoother control response | [ |
| 双曲正切控制律Hyperbolic tangent control law | 适用于调节存在干扰的非线性系统 Suitable for adjusting nonlinear systems with disturbances | 能够在接近滑模面时平滑控制输入,减少不稳定性 Can smooth the control input near the sliding surface and reduce instability | [ | |
| 饱和控制律 Saturation control law | 适用于高非线性系统中,如电机驱动 Suitable for highly nonlinear systems, such as motor drives | 避免控制输入过大导致系统不稳定 Avoids excessive control input that may cause system instability | [ |
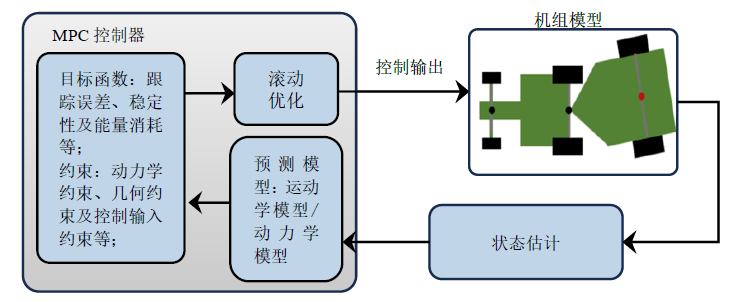
图6 基于模型预测控制的机组路径跟踪原理
Fig. 6. Principles of path tracking based on model predictive control
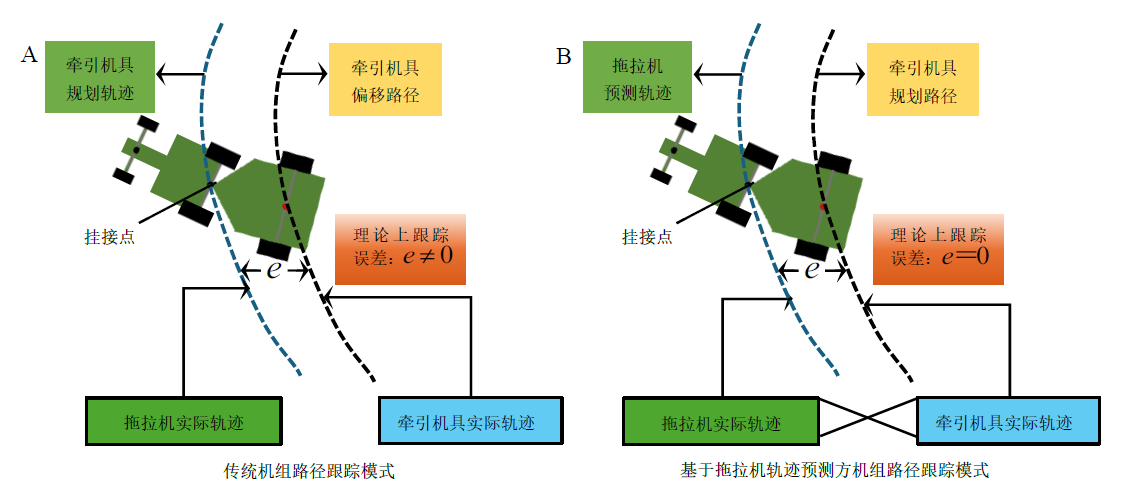
图7 基于拖拉机轨迹预测方法的路径跟踪模式与传统跟踪模式对比
Fig. 7. Path tracking models based on tractor trajectory prediction method and traditional tracking model
| 转向特点 Steering characteristic | 优点 Advantages | 缺点 Disadvantage | 适用场景 Application scenario | 相关文献 Reference |
|---|---|---|---|---|
| 机具无发自主转向 Implement has no active steering | 结构简单,制造和维护成本较低 Simple structure, low manufacturing and maintenance costs | 狭窄空间内操作困难,横向稳定性较差 Difficult to operate in narrow spaces, poor lateral stability | 适用于大田等开阔场景中作业 Suitable for open field operations | [ |
| 机具车轮受侧向力或悬架 侧向弹性力自动转向 Implement wheels steer automatically by lateral force or suspension elasticity | 在一定程度上可以自动调整车轮方向,改善了低速时路径跟踪能力 Can automatically adjust the overall steering to some extent, improves path keeping at low speed | 控制精度不如主动转向系统高,高速行驶时,轮胎易侧滑 Lower control accuracy than active systems, wheels may sideslip at high speed | 在田间进行中低速作业,如喷洒、播种 Used for medium and low-speed field operations such as spraying and seeding | [ |
| 机具车轮通过独立控制器 控制转向角度以及速度 Implement wheels' steering angle and speed controlled by independent controller and speed controlled by independent controller | 可精确控制车轮的转向角度,提高了转向灵活性 Precise steering angle control, improves steering flexibility | 需要精确的传感器和控制系统成本高,维护难度大 Requires extra sensors and control systems, high cost and maintenance complexity | 适合复杂地形进行精准作业,如果树、行间作业 Suitable for precision work on complex terrains, such as orchards and inter-row operations | [ |
表5 拖拉机作业机组现有转向结构对比
Table 5. Comparison of Existing Steering Structures for Tractor Operating Units
| 转向特点 Steering characteristic | 优点 Advantages | 缺点 Disadvantage | 适用场景 Application scenario | 相关文献 Reference |
|---|---|---|---|---|
| 机具无发自主转向 Implement has no active steering | 结构简单,制造和维护成本较低 Simple structure, low manufacturing and maintenance costs | 狭窄空间内操作困难,横向稳定性较差 Difficult to operate in narrow spaces, poor lateral stability | 适用于大田等开阔场景中作业 Suitable for open field operations | [ |
| 机具车轮受侧向力或悬架 侧向弹性力自动转向 Implement wheels steer automatically by lateral force or suspension elasticity | 在一定程度上可以自动调整车轮方向,改善了低速时路径跟踪能力 Can automatically adjust the overall steering to some extent, improves path keeping at low speed | 控制精度不如主动转向系统高,高速行驶时,轮胎易侧滑 Lower control accuracy than active systems, wheels may sideslip at high speed | 在田间进行中低速作业,如喷洒、播种 Used for medium and low-speed field operations such as spraying and seeding | [ |
| 机具车轮通过独立控制器 控制转向角度以及速度 Implement wheels' steering angle and speed controlled by independent controller and speed controlled by independent controller | 可精确控制车轮的转向角度,提高了转向灵活性 Precise steering angle control, improves steering flexibility | 需要精确的传感器和控制系统成本高,维护难度大 Requires extra sensors and control systems, high cost and maintenance complexity | 适合复杂地形进行精准作业,如果树、行间作业 Suitable for precision work on complex terrains, such as orchards and inter-row operations | [ |
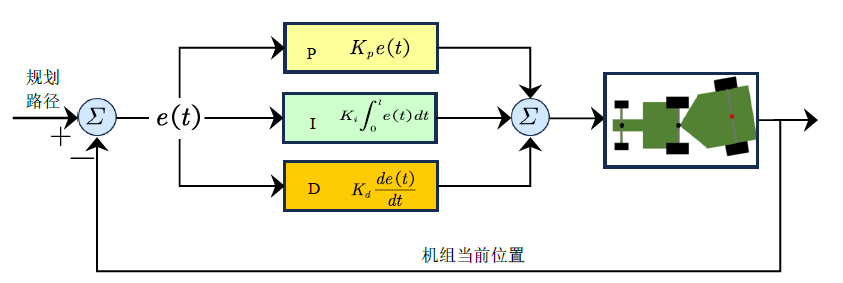
图8 基于PID算法的路径跟踪控制原理
Fig. 8. Schematic diagram of path tracking control based on PID algorithm
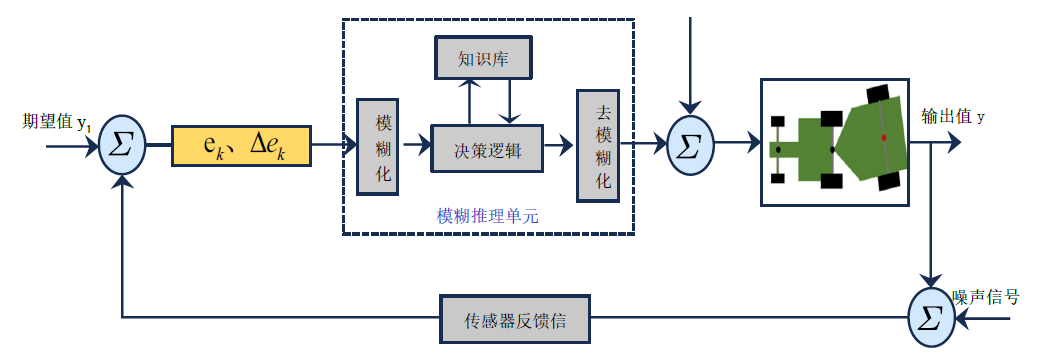
图9 基于模糊逻辑推理的路径跟踪控制原理
Fig. 9. Path tracking control principle based on fuzzy logic reasoning
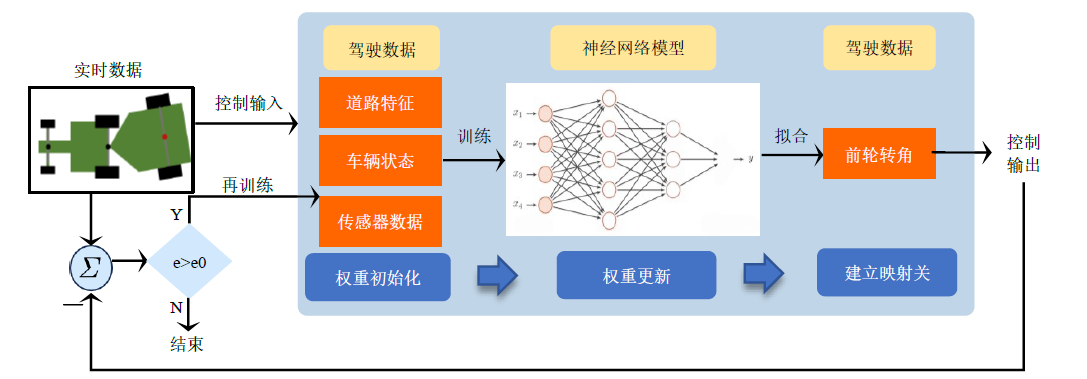
图10 基于神经网络的路径跟踪控制原理
Fig. 10. Neural network based path tracking control schematic
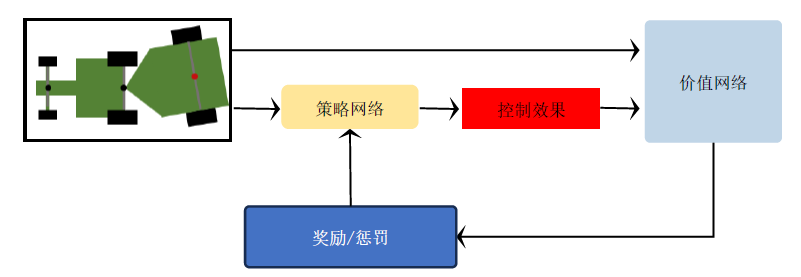
图11 基于强化学习的路径跟踪控制原理
Fig. 11. Schematic diagram of path tracking control based on reinforcement learning
| [1] | 乔晓东, 王晓燕, 颜华, 李洪文, 何进, 王庆杰. 后悬挂农具田间试验平台[J]. 农业机械学报, 2013, 44(8): 63-68. |
| Qiao X D, Wang X Y, Yan H, Li H W, He J, Wang Q J. Field test platform for rear suspension agricultural implements[J]. Journal of Agricultural Machinery, 2013, 44(8): 63-68. (in Chinese with English abstract) | |
| [2] | 张振国, 郭全峰, 蒋贵菊, 王蕴泽, 邢振宇, 许鹏. 玉米免耕播种自动调偏系统设计与试验[J]. 农业机械学报, 2024, 55(3): 40-52. |
| Zhang Z G, Guo Q F, Jiang G J, Wang Y Z, Xing Z Y, Xu P. Design and test of automatic bias adjustment system for no-tillage seeding of corn[J]. Journal of Agricultural Machinery, 2024, 55(3): 40-52. (in Chinese with English abstract) | |
| [3] | 杨延强, 贠莹莹, 陈兆英, 范国强, 董和银, 王玉亮. 牵引式液态肥喷洒机设计与试验[J]. 农业机械学报, 2022, 53(1): 159-167. |
| Yang Y Q, Yun Y Y, Chen Z Y, Fan G Q, Dong H Y, Wang Y L. Design and test of a tractor-mounted liquid fertilizer sprayer[J]. Journal of Agricultural Machinery, 2022, 53(1): 159-167. (in Chinese with English abstract) | |
| [4] | 王申莹, 胡志超, Charles C, 高学梅, 顾峰玮, 吴惠昌. 牵引式甜菜联合收获机自动对行系统设计与台架试验[J]. 农业机械学报, 2020, 51(4): 103-112. |
| Wang S Y, Hu Z C, Charles C, Gao X M, Gu F W, Wu H C. Design and bench test of automatic row alignment system for towed sugar beet combine harvester[J]. Journal of Agricultural Machinery, 2020, 51(4): 103-112. (in Chinese with English abstract) | |
| [5] | Zhou Y, Chung K W. Path tracking control of a tractor-trailer wheeled robot kinematics with a passive steering angle[J]. Applied Mathematical Modelling, 2022, 109: 341-357. |
| [6] | Ding C, Ding S, Wei X. Composite SOSM controller for path tracking control of agricultural tractors subject to wheel slip[J]. ISA Transactions, 2022, 130: 389-398. |
| [7] | 张硕, 武仲斌, 陈军, 李臻, 朱忠祥, 宋正河, 毛恩荣. 犁耕作业大马力拖拉机驱动轮滑转率控制方法[J]. 农业工程学报, 2020, 36(15): 47-55. |
| Zhang S, Wu Z B, Chen J, Li Z, Zhu Z X, Song Z H, Mao E R. A method for controlling the slip rate of the drive wheel of a high-horsepower tractor in plowing operation[J]. Journal of Agricultural Engineering, 2020, 36(15): 47-55. (in Chinese with English abstract) | |
| [8] | 刘智勇, 温昌凯, 肖跃进, 付卫强, 王昊, 孟志军. 拖拉机-牵引式农机具路径跟踪控制算法研究[J]. 智慧农业, 2023, 5(4): 58-67. |
| Liu Z Y, Wen C K, Xiao Y J, Fu W Q, Wang H, Meng Z J. Research on path tracking control algorithm of tractor-tractor type farm implements[J]. Smart Agriculture, 2023, 5(4): 58-67. | |
| [9] | Xiong Z H, Hak J K, Joon Y K, Sang Y Y, Hee C M, Jung H K, Young J K. Path-tracking simulation and field tests for an auto-guidance tillage tractor for a paddy field[J]. Computers and Electronics in Agriculture, 2015, 112: 161-171. |
| [10] | Xin J, Shi H D, Xin H W, Ke Q M, Bing B C, Jin L S. Path tracking control of unmanned agricultural tractors via modified super twisting sliding mode and disturbance observer[J]. IEEE/ASME Transactions on Mechatronics, 2024: 1-12. |
| [11] | 白学峰, 常江雪, 滕兆丽, 鲁植雄. 我国智能农业拖拉机关键技术研究进展[J]. 智能化农业装备学报, 2022, 3(2): 10-21. |
| Bai X F, Chang J X, Teng Z L, Lu Z X. Progress of key technology research on intelligent agricultural tractors in China[J]. Journal of Intelligent Agricultural Equipment, 2022, 3(2): 10-21. (in Chinese with English abstract) | |
| [12] | 孟志军, 王昊, 付卫强, 刘孟楠, 尹彦鑫, 赵春江. 农业装备自动驾驶技术研究现状与展望[J]. 农业机械学报, 2023, 54(10): 1-24. |
| Meng Z J, Wang H, Fu W Q, Liu M N, Ying Y X, Zhao C J. Research status and prospect of automatic driving technology for agricultural equipment[J]. Journal of Agricultural Machinery, 2023, 54(10): 1-24. (in Chinese with English abstract) | |
| [13] | Wei W B, Xiao M, Duan W W, Wang H, Zhu Y J, Zhai C, Geng G S. Research progress on autonomous operation technology for agricultural equipment in large fields[J]. Agriculture, 2024, 14(9): 1473. |
| [14] | 祝青园, 程家琪, 陈轩伟, 杨昌霖, 高云龙, 邵桂芳. 无人驾驶铰接转向车辆路径跟踪控制研究综述[J]. 农业机械学报, 2024, 55(1): 1-21. |
| Zhu Q Y, Cheng J Q, Chen X W, Yang C L, Gao Y L, Shao G F. A review on path tracking control of unmanned articulated steering vehicles[J]. Journal of Agricultural Machinery, 2024, 55(1): 1-21. (in Chinese with English abstract) | |
| [15] | 陈军, 鸟巢谅, 武田纯一. 带单轴拖车拖拉机自动倒车行驶的研究[J]. 农业工程学报, 2005(10): 82-85. |
| Jun C, Azuma T, Junichi T. Study on automatic reverse traveling of tractor with single axle trailer[J]. Journal of Agricultural Engineering, 2005(10): 82-85. (in Chinese with English abstract) | |
| [16] | Murillo M, Sánchez G, Deniz N, Genzelis L, Giovanini L. Improving path-tracking performance of an articulated tractor-trailer system using a non-linear kinematic model[J]. Computers and Electronics in Agriculture, 2022, 196: 106826. |
| [17] | Lu E, Xue J L, Chen T J, Jiang S. Robust trajectory tracking control of an autonomous tractor-trailer considering model parameter uncertainties and disturbances[J]. Agriculture, 2023, 13(4): 869. |
| [18] | Daher N, Ivantysynova M. Yaw stability control of articulated frame off-highway vehicles via displacement controlled steer-by-wire[J]. Control Engineering Practice, 2015, 45: 46-53. |
| [19] | Kayacan E, Kayacan E, Ramon H, Saeys W. Nonlinear modeling and identification of an autonomous tractor-trailer system[J]. Computers and Electronics in Agriculture, 2014, 106: 1-10. |
| [20] | 郭兴海, 计明军, 张卫丹. 融合多目标与速度控制的AGV全局路径规划[J]. 控制与决策, 2020, 35(6): 1369-1376. |
| Guo X H, Ji M J, Zhang W D. Global path planning for AGVs incorporating multi-objective and velocity control[J]. Control and Decision Making, 2020, 35(6): 1369-1376. (in Chinese with English abstract) | |
| [21] | Bevly D M, Gerdes J C, Parkinson B W. A New Yaw Dynamic model for improved high speed control of a farm tractor[J]. Journal of Dynamic Systems, Measurement, and Control, 2002, 124(4): 659-667. |
| [22] | Synak F, Jakubovicova L. Assessing the risks arising from a trailer connected behind a passenger car[J]. Scientific Reports, 2024, 14(1): 21937. |
| [23] | Babaei R A, Arezoo K, Alipour K, Tarvirdizadeh B. Dynamics modeling and path following controller of tractor-trailer-wheeled robots considering wheels slip[J]. ISA Transactions, 2024, 148: 45-63. |
| [24] | Chindamo D, Lenzo B, Gadola M. On the vehicle sideslip angle estimation: A literature review of methods, models, and innovations[J]. Applied Sciences, 2018, 8(3): 355. |
| [25] | Zhou C, Yu L, Li Y, Jian S. Robust sideslip angle observer of commercial vehicles based on cornering stiffness estimation using neural network[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 237(1): 224-243. |
| [26] | Gadola M, Chindamo D, Romano M, Padula F. Development and validation of a Kalman filter-based model for vehicle slip angle estimation[J]. Vehicle System Dynamics, 2014, 52(1): 68-84. |
| [27] | Sun W, Wang Z, Wang J, Wang X, Liu L. Research on a real-time estimation method of vehicle sideslip angle based on EKF[J]. Sensors, 2022, 22(9): 3386. |
| [28] | Hyun M, Cho W. Estimation of road bank angle and vehicle side slip angle using bayesian tracking and kalman filter approach[J]. International Journal of Automotive Technology, 2018, 19(6): 993-1000. |
| [29] | Jwo D J, Yang C F, Chuang C H, Lee T Y. Performance enhancement for ultra-tight GPS/INS integration using a fuzzy adaptive strong tracking unscented Kalman filter[J]. Nonlinear Dynamics, 2013, 73(1-2): 377-395. |
| [30] | Jo K, Kim J, Sunwoo M. Real-time road-slope estimation based on integration of onboard sensors with GPS using an IMMPDA filter[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(4): 1718-1732. |
| [31] | Ding N, Chen W, Zhang Y, Xu G, Gao F. An extended Luenberger observer for estimation of vehicle sideslip angle and road friction[J]. International Journal of Vehicle Design, 2014, 66(4): 385. |
| [32] | Alagappan A V, Rao K V N, Kumar R K. A comparison of various algorithms to extract magic formula tyre model coefficients for vehicle dynamics simulations[J]. Vehicle System Dynamics, 2015, 53(2): 154-178. |
| [33] | Huang C, Chen L, Jiang H, Chao C Y, Tian X. Fuzzy chaos control for vehicle lateral dynamics based on active suspension system[J]. Chinese Journal of Mechanical Engineering, 2014, 27(4): 793-801. |
| [34] | 唐昊. 拖拉机牵引机组局部路径规划与跟踪控制方法研究[D]. 镇江: 江苏大学, 2023. |
| Tang H. Research on local path planning and tracking control method of tractor unit[D]. Zhenjiang: Jiangsu University, 2023. (in Chinese with English abstract) | |
| [35] | Keymasi K A, Moosavian S A A. Robust adaptive controller for a tractor-trailer mobile robot[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(3): 943-953. |
| [36] | Murillo M, Sanchez G, Deniz N, Genzelis L, Giovanini L. Improving path-tracking performance of an articulated tractor-trailer system using a non-linear kinematic model[J]. Computers and Electronics in Agriculture, 2022, 196: 106826. |
| [37] | Taghavifar H, Rakheja S. A novel terramechanics-based path-tracking control of terrain-based wheeled robot vehicle with matched-mismatched uncertainties[J]. IEEE Transactions on Vehicular Technology, 2020, 69(1): 67-77. |
| [38] | Lashkari N, Biglarbegian M, Yang S X. Development of a new robust controller with velocity estimator for docked mobile robots: Theory and experiments[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(3): 1287-1298. |
| [39] | Prado A J, Torres T M, Cheein F A. Distributed tube-based nonlinear MPC for motion control of skid-steer robots with terra-mechanical constraints[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8045-8052. |
| [40] | Duan S, Bai X F, Shi Q, Liu Z H. Nonlinear dynamics analysis in pneumatic tire modeling[J]. Nonlinear Dynamics, 2023, 111(2): 1095-1107. |
| [41] | Geng C, Mostefai L, Denai M, Hori Y. Direct yaw-moment control of an in-wheel-motored electric vehicle based on body slip angle fuzzy observer[J]. IEEE Transactions on Industrial Electronics, 2009, 56(5): 1411-1419. |
| [42] | Zhang Y, Khajepour A, Huang Y. Multi-axle/articulated bus dynamics modeling: A reconfigurable approach[J]. Vehicle System Dynamics, 2018, 56(9): 1315-1343. |
| [43] | Khemoudj O, Imine H, Djemai M. Robust observation of tractor-trailer vertical forces using inverse model and exact differentiator[J]. SAE International Journal of Materials and Manufacturing, 2010, 3(1): 278-289. |
| [44] | Paszkowiak W, Pelic M, Bartkowiak T. A neural-network-based control system for a dynamic model of tractor with multiple trailers system[J]. International Journal of Control, Automation and Systems, 2023, 21(10): 3456-3469. |
| [45] | Habibnejad K A, Khajepour A, Fidan B. Vehicle-trailer lateral velocity estimation using constrained unscented transformation[J]. Vehicle System Dynamics, 2022, 60(3): 1048-1075. |
| [46] | Lu Y, Zhang J, Yang S, Li Z Y. Study on improvement of LuGre dynamical model and its application in vehicle handling dynamics[J]. Journal of Mechanical Science and Technology, 2019, 33(2): 545-558. |
| [47] | Babaei R A, Arezoo K, Alipour K, Tarvirdizadeh B. Dynamics modeling and path following controller of tractor-trailer-wheeled robots considering wheels slip[J]. ISA Transactions, 2024, 148: 45-63. |
| [48] | Tuan H T. A simulation approach to determine dynamic rollover threshold of a tractor semi-trailer vehicle during turning maneuvers[J]. Journal of Vibration Engineering & Technologies, 2024, 12(S1): 63-78. |
| [49] | Liu C H, Guan Z W, Shen R W. The optimal guaranteed cost control of tractor-semitrailer steering stability[J]. International Journal of Control and Automation, 2015, 8(12): 367-374. |
| [50] | Sousa L C, Ayala H V H. Nonlinear tire model approximation using machine learning for efficient model predictive control[J]. IEEE Access, 2022, 10: 107549-107562. |
| [51] | Manav A C, Lazoglu I, Aydemir E. Adaptive path-following control for autonomous semi-trailer docking[J]. IEEE Transactions on Vehicular Technology, 2022, 71(1): 69-85. |
| [52] | Lee Y, Park K. Robust control based on DOBC for improving lateral string stability of truck platooning[J]. IEEE International Conference on Intelligent Transportation Systems, 2021: 2048-2053. |
| [53] | Aydemir E, Unel M. Motion planning and path following for autonomous navigation and reversing of a full-scale mining truck and trailer system[J]. International Journal of Automotive Technology, 2024. |
| [54] | Chung S C, Lin C L. A general class of sliding surface for sliding mode control[J]. IEEE Transactions on Automatic Control, 1998, 43(1): 115-119. |
| [55] | Ji X, Ding S, Wei X, Cui B B. Path tracking of unmanned agricultural tractors based on a novel adaptive second-order sliding mode control[J]. Journal of the Franklin Institute, 2023, 360(8): 5811-5831. |
| [56] | Nayl T, Nikolakopoulos G, Gustafsson T, Nyberg R. Design and experimental evaluation of a novel sliding mode controller for an articulated vehicle[J]. Robotics and Autonomous Systems, 2018, 103: 213-221. |
| [57] | Jalali M, Khosravani S, Khajepour A, Litkouhi B. Model predictive control of vehicle stability using coordinated active steering and differential brakes[J]. Mechatronics, 2017, 48: 30-41. |
| [58] | Alipour K, Robat A B, Tarvirdizadeh B. Dynamics modeling and sliding mode control of tractor-trailer wheeled mobile robots subject to wheels slip[J]. Mechanism and Machine Theory, 2019, 138: 16-37. |
| [59] | Sawinski A, Chudzik P, Tatar K. SMC algorithms in T-type bidirectional power grid converter[J]. Energies, 2024, 17(12): 2970. |
| [60] | Ma H, Wu J, Xiong Z. A Novel exponential reaching law of discrete-time sliding-mode control[J]. IEEE Transactions on Industrial Electronics, 2017, 64(5): 3840-3850. |
| [61] | Chen X, Li Y, Ma H, Xie Y L. A novel variable exponential discrete time sliding mode reaching law[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68(7): 2518-2522. |
| [62] | Samantaray J, Chakrabarty S. Discrete-time sliding mode control with inverse hyperbolic sine reaching law[J]. Journal of the Franklin Institute, 2024, 361(14): 107108. |
| [63] | Nayl T, Nikolakopoulos G, Gustafsson. A full error dynamics switching modeling and control scheme for an articulated vehicle[J]. International Journal of Control, Automation and Systems, 2015, 13(5): 1221-1232. |
| [64] | Esmaeili N, Kazemi R, Oreh S H T. An adaptive sliding mode controller for the lateral control of articulated long vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2018, 233(3): 487-515. |
| [65] | Alipour K, Robat A B, Tarvirdizadeh B. Dynamics modeling and sliding mode control of tractor-trailer wheeled mobile robots subject to wheels slip[J]. Mechanism and Machine Theory, 2019, 138: 16-37. |
| [66] | Stano P, Montanaro U, Tavernini D, Tufo M, Fiengo G, Novella L, Sorniotti A. Model predictive path tracking control for automated road vehicles: A review[J]. Annual Reviews in Control, 2023, 55: 194-236. |
| [67] | Kassaeiyan P, Tarvirdizadeh B, Alipour K. Control of tractor-trailer wheeled robots considering self-collision effect and actuator saturation limitations[J]. Mechanical Systems and Signal Processing, 2019, 127: 388-411. |
| [68] | Kayacan E, Kayacan E, Ramon H, Saeys W. Learning in centralized nonlinear model predictive control: application to an autonomous tractor-trailer system[J]. IEEE Transactions on Control Systems Technology, 2015, 23(1): 197-205. |
| [69] | Kayacan E, Kayacan E, Ramon H, Saeys W. Distributed nonlinear model predictive control of an autonomous tractor-trailer system[J]. Mechatronics, 2014, 24(8): 926-933. |
| [70] | Jeong D, Choi S B. Tube-based robust model predictive control for tracking control of autonomous articulated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 2184-2196. |
| [71] | Lei G, Zheng Y. Research on cooperative trajectory planning algorithm based on tractor-trailer wheeled robot[J]. IEEE Access, 2022, 10: 64209-64221. |
| [72] | Yuan J, Yang S, Cai J. Consistent path planning for on-axle-hitching multisteering trailer systems[J]. IEEE Transactions on Industrial Electronics, 2018, 65(12): 9625-9634. |
| [73] | Yuan J. Hierarchical motion planning for multisteering tractor-trailer mobile robots with on-axle hitching[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(4): 1652-1662. |
| [74] | Zhou Y, Chung K W. Path tracking control of a tractor-trailer wheeled robot kinematics with a passive steering angle[J]. Applied Mathematical Modelling, 2022, 109: 341-357. |
| [75] | Miao S, Zhou Y. An identical path tracking control strategy of the tractor-trailer wheeled mobile robot with an off-axle hitching based on a passive steering angle[J]. Journal of the Franklin Institute, 2024, 361(4): 106634. |
| [76] | Xu X, Zhang L, Jiang Y, Chen N. Active control on path following and lateral stability for truck-trailer combinations[J]. Arabian Journal for Science and Engineering, 2019, 44(2): 1365-1377. |
| [77] | Liu Z, Yue M, Guo L, Zhang Y S. Trajectory planning and robust tracking control for a class of active articulated tractor-trailer vehicle with on-axle structure[J]. European Journal of Control, 2020, 54: 87-98. |
| [78] | Kayacan E, Kayacan E, Ramon H, Saeys W. Robust tube-based decentralized nonlinear model predictive control of an autonomous tractor-trailer system[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(1): 447-456. |
| [79] | Wang Y, Niu B, Wang H, Alkhateeb A. Neural network-based adaptive tracking control for switched nonlinear systems with prescribed performance: An average dwell time switching approach[J]. Neurocomputing, 2021, 435: 295-306. |
| [80] | Jin Z, Liang Z, Guo P, Zheng M W. Adaptive backstepping tracking control of a car with n trailers based on RBF neural network[J]. Asian Journal of Control, 2021, 23(2): 824-834. |
| [81] | Xu N, Niu B, Wang H, Zhao X D. Single‐network ADP for solving optimal event‐triggered tracking control problem of completely unknown nonlinear systems[J]. International Journal of Intelligent Systems, 2021, 36(9): 4795-4815. |
| [82] | Li B, Acarman T, Zhang Y, Zhang L L, Yaman C, Kong Q. Tractor-trailer vehicle trajectory planning in narrow environments with a progressively constrained optimal control approach[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(3): 414-425. |
| [83] | Jin Z, Liang Z, Wang X, Zheng M W. Adaptive backstepping sliding mode control of tractor-trailer system with input delay based on RBF neural network[J]. International Journal of Control, Automation and Systems, 2021, 19(1): 76-87. |
| [84] | Binh N T, Tung N A, Nam D P, Quang N H. An adaptive backstepping trajectory tracking control of a tractor trailer wheeled mobile robot[J]. International Journal of Control, Automation and Systems, 2019, 17(2): 465-473. |
| [85] | Zhou Y, Chung K W. Path tracking control of a tractor-trailer wheeled robot kinematics with a passive steering angle[J]. Applied Mathematical Modelling, 2022, 109: 341-357. |
| [86] | Khalaji A K. PID-based target tracking control of a tractor-trailer mobile robot[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2019, 233(13): 4776-4787. |
| [87] | Khanpoor A, Khalaji A K, Moosavian S A A. Modeling and control of an underactuated tractor-trailer wheeled mobile robot[J]. Robotica, 2017, 35(12): 2297-2318. |
| [88] | Shojaei K. Intelligent coordinated control of an autonomous tractor-trailer and a combine harvester[J]. European Journal of Control, 2021, 59: 82-98. |
| [89] | Abroshan M, Taiebat M, Goodarzi A, Khajepou A. Automatic steering control in tractor semi-trailer vehicles for low-speed maneuverability enhancement[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2017, 231(1): 83-102. |
| [90] | Tanaka K, Hori S, Wang H O. Multiobjective control of a vehicle with triple trailers[J]. IEEE/ASME Transactions on Mechatronics, 2002, 7(3): 357-368. |
| [91] | Farbood M, Shasadeghi M, Niknam T, Safarinejadian B. Fuzzy lyapunov-based model predictive sliding-mode control of nonlinear systems: An ellipsoid recursive feasibility approach[J]. IEEE Transactions on Fuzzy Systems, 2022, 30(6): 1929-1938. |
| [92] | Wang A, Wang Y, Ji X, Wang K, Qian M, Wei X H, Song Q, Chen W M, Zhang S C. Fuzzy backstepping controller for agricultural tractor-trailer vehicles path tracking control with experimental validation[J]. Frontiers in Plant Science, 2024, 15. |
| [93] | Paszkowiak W, Pelic M, Bartkowiak T. A neural-network-based control system for a dynamic model of tractor with multiple trailers system[J]. International Journal of Control, Automation and Systems, 2023, 21(10): 3456-3469. |
| [94] | Shojaei K, Abdolmaleki M. Output feedback control of a tractor with N-trailer with a guaranteed performance[J]. Mechanical Systems and Signal Processing, 2020, 142: 106746. |
| [95] | Elhaki O, Shojaei K. Observer‐based neural adaptive control of a platoon of autonomous tractor-trailer vehicles with uncertain dynamics[J]. IET Control Theory & Applications, 2020, 14(14): 1898-1911. |
| [96] | Korayem A H, Khajepour A, Fidan B. Trailer mass estimation using system model-based and machine learning approaches[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 12536-12546. |
| [97] | Yue M, Hou X, Gao J, Yang L. RBFNN‐based identification and compensation mechanism for disturbance‐like parametric friction with application to tractor‐trailer vehicles[J]. Asian Journal of Control, 2020, 22(1): 398-410. |
| [98] | Tang X, Shi L, Wang B, Cheng A Q. Weight adaptive path tracking control for autonomous vehicles based on PSO-BP neural network[J]. Sensors, 2022, 23(1): 412. |
| [99] | Han G, Fu W, Wang W, Wu Z S. The lateral tracking control for the intelligent vehicle based on adaptive PID neural network[J]. Sensors, 2017, 17(6): 1244. |
| [100] | Kim H, Kee S C. Neural network approach super-twisting sliding mode control for path-tracking of autonomous vehicles[J]. Electronics, 2023, 12(17): 3635. |
| [101] | Wang J, Liang H, Zhao P, Li Z Y, Wang Z L. Research on decision-making method of unmanned tractor-trailer based on T-DDPG[J]. International Conference on Mechatronics and Automation, 2022: 1189-1196. |
| [102] | Bejar E, Moran A. Backing up control of a self-driving truck-trailer vehicle with deep reinforcement learning and fuzzy logic[J]. IEEE Symposium on Signal Processing and Information Technology, 2018: 202-207. |
| [103] | Han S, Yoon K, Park G, Kunsoo H. Hybrid state observer design for estimating the hitch angles of tractor-multi unit trailer[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(2): 1449-1458. |
| [104] | Albeaik S, Wu T, Vurimi G, Chou F C, Lu X Y, Bayen A M. Longitudinal deep truck: Deep longitudinal model with application to sim2real deep reinforcement learning for heavy‐duty truck control in the field[J]. Journal of Field Robotics, 2023, 40(2): 306-329. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||